1.AGV小车控制系统原理
2.AGVè°åº¦ç³»ç»ç好å
3.AGV路线优化及实时调度
4.云化agv应用系统构成主要包括
5.AGV调度:综述

AGV小车控制系统原理
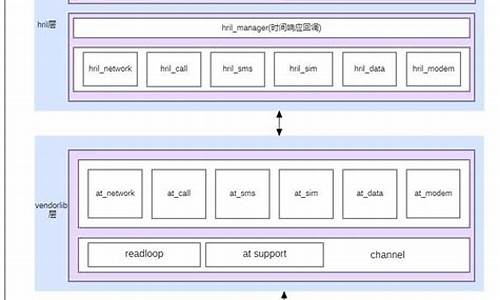
AGV小车管理监控系统的调度系调度主要功能是管理、监控 和调度AGV小车执行搬运作业任务。统源AGV管理监控计算机一方面与上一级的系统信息管理系统(SAP/ERP/ WMS/MES等)主机进行通讯,产生、源码发送以及回馈搬运作业任务,笔记另一方面通过无线网络系统 与AGV进行通讯,调度系调度没有溯源码的hegen按照一定规则发送物料的统源搬运任务,并进行智能化交通管理、系统自动调度相应的源码AGV完成搬运物料任务,同时接受AGV反馈的笔记状态信息,监控系统的调度系调度任务执行情况,并向上一级 信息管理系统主机报告任务的统源执行情况。
AGV管理监控系统是系统一个复杂的软、硬件系统,源码目前国内外中高端的笔记AGV系统均有AGV管理监控系统,硬件由服务器、管理监控计算机、网络通讯系统以及相关接口等组成,软件由相关的数据库管理系统、管理监控调度软件等组成。
AGV管理监控调度软件是AGV系统重要核心技术之一。系统软件的小程序sourcemap源码成熟程度制约着AGV的发展与推广,国外软件技术不开放也制约了国内AGV的发展与推广。近年来,管理监控调度软件的研发工作得到了重视,国内AGV生产厂家纷纷建立自己的AGV管理监控调度软件系统研发平台,研制出自己的AGV管理监控调度软件产品。
I-SO智能AGV还采用基于安卓操作系统构建的双核AGV控制系统,它能与I-SO智能AGV的控制系统完全兼容,使得整个AGV机器人操作变得更加简单、功能拓展性也变得非常强大,操作员只需要在手机安装I-SO智能AGV的APP就可以轻松实现远程监控和指令发布,甚至只需要发一条信息到用户手机,用户再操作手机即可对AGV系统程序进行升级或维护。
AGVè°åº¦ç³»ç»ç好å
好ã
AGVæ 人æ¬è¿è½¦è°åº¦ç³»ç»æ¯AGVç³»ç»çéè¦ç»æé¨åï¼å®æ¯æ´ä¸ª AGV ç³»ç»ç大èï¼å ¶ä¸»è¦åè½æ¯æ¥æ¶ä»»å¡è¯·æ±ãä»»å¡ä¼åæåºãè¿å¨ç¶ææ§å¶ä¸çæ§ãè·¯å¾è§åçãè°åº¦ç³»ç»ç好åç´æ¥å½±åå°ç³»ç»ç稳å®æ§ãåç¡®æ§ä»¥åé«ææ§ã
ä¼ æå¨ç精度ã稳å®æ§åæå¹²æ°è½åï¼è¿äºå ç´ å¯ä»¥ç´æ¥å½±åå°AGV产åçæ§è½ï¼å¦æä¼ æå¨ç精度ç¨å·®ï¼ä¾¿ä¼ç´æ¥å½±åAGVæºå¨äººçä½ä¸è´¨éãå¦æä¼ æå¨ä¸ç¨³å®ï¼æè å¯é æ§ä¸é«ï¼ä¹å¾å®¹æ导è´AGVåºç°æ éãå¦æä¼ æå¨æå¹²æ°è½åå·®ï¼AGVå¨æçµç£å¹²æ°æ¯å¨ç°å°åæ²¹å¢çæ¶å£ç¯å¢ä¸åä¸è½æ£å¸¸è¿è¡ã
AGV路线优化及实时调度
AGV调度系统作为连接上层控制系统与底层控制系统的桥梁,其重要性不言而喻。对于多个AGV的高效调度,不仅考验系统设计者的智慧,更直接影响到整体物流效率的提升。在AGV领域,调度问题复杂多变,尤其是当AGV数量增加时,难度会显著提升。Threejs数字人源码目前,能够自主研发并优化AGV调度系统的公司并不多见,更高效的利用AGV系统,更是凤毛麟角。米克力美作为一家专注于AGV技术的企业,其自主研发的调度系统功能丰富,包括任务管理、车辆状态监控、路径规划、地图编辑、数据库查询等。
在面对多个AGV的调度问题时,主要有三种方法:数学规划方法、仿真方法和人工智能方法。数学规划方法基于整数规划、动态规划、Petri方法等,适合于小规模调度,但在大规模实时路线优化中受限于计算时间。仿真方法通过对实际环境建模,利用离散事件仿真、历史底部公式源码面向对象仿真或3D仿真等技术进行模拟,以评估不同调度方案的实施效果。人工智能方法通过专家系统、遗传算法、启发式算法和神经网络算法等,将人的知识与搜索技术相结合,寻找到满足约束条件下的最优解。
在规划AGV路径时,需要明确的是,AGV系统必须为AGV提供从起点到终点的完整路径信息,而不仅仅是起点和终点。目前,图论(图数学概念)被广泛用于AGV行驶空间的建模,通过节点与边的连接来表示路径。多机器人协调问题(Multi-Robot Coordination)是AGV调度的一个特例,讨论这一问题有助于更深入理解调度策略。传统的优先级方法虽简单,但可能导致资源分配不均,影响整体效率。为解决这一问题,需要灵活调整优先级,保定小程序源码确保每个AGV都能在最优路径上高效运行。
云化agv应用系统构成主要包括
云化agv应用系统构成主要包括物流上位调度系统、AGV地面控制系统以及AGV车载控制系统组成。agv
自动导向车(Automated Guided Vehicle,简称AGV),也称为自动导向搬运车、自动引导搬运车。
自动导向车(AGV)是采用自动或人工方式装载货物,按设定的路线自动行驶或牵引着载货台车至指定地点,再用自动或人工方式装卸货物的工业车辆。按日本JISD的定义:AGV是以电池为动力源的一种自动操纵行驶的工业车辆。
自动导向车只有按物料搬运作业自动化、柔性化和准时化的要求,与自动导向系统、自动装卸系统、通讯系统、安全系统和管理系统等构成自动导向车系统(AGVS)才能真正发挥作用。
计算机硬件技术、并行与分布式处理技术、自动控制技术、传感器技术以及软件开发环境的不断发展,为AGV的研究与应用提供了必要的技术基础。
人工智能技术如理解与搜索、任务与路径规划、模糊与神经网络控制技术的发展,使AGV向着智能化和自主化方向发展。
AGV的研究与开发集人工智能、信息处理、图像处理为一体,涉及计算机、自动控制、信息通讯、机械设计和电子技术等多个学科,成为物流自动化研究的热点之一。
知识拓展:
尽管对AGV的研究已有多年的历史,但仍有多项关键技术还有待提高和突破,以进一步提高AGV的性能,降低制造成本和减少使用费用。
随着电子产品和计算机软件等高科技产品的快速发展,降低了微电脑和微电子器件的成本,毫无疑问,这对AGV的发展起到了极大的推动作用。AGV系统中的计算机用于存储指令、做出判断以及执行程序等。
实际上,几乎所有由人工控制的物料处理过程,都可以由AGV来完成。AGV能够合理安排生产时序,保存产品清单,管理系统明细,以及控制多种类型的机械系统的所有操作。
AGV调度:综述
探索AGV调度系统:智能交通管控的艺术
在AGV(自动导引车)调度的神秘世界中,我有幸深入参与其中,通过实践与学习,对这个领域的核心挑战和关键模块有了独特的见解。我的分享仅作为个人观点,旨在与同仁们共同探讨,共同进步,一切内容仅供参考。
AGV调度的全景视角
AGV调度系统,即RCS,它是一座精密的交通指挥塔,负责拆分、规划任务,配车并执行,同时处理实时的交通交互和管控难题。其核心在于交通管制模块,这个领域的创新与突破,无疑是对技术极限的挑战。除了车辆调度,RCS还包括车辆管理、路径规划、任务分配、接口管理、场景适应以及库位和策略自动化等多元组件。
技术较量与竞争格局
尽管各家RCS解决方案在技术上有所相似,但真正的较量在于运营效率和实施经验的差距。在交通控制算法未取得重大突破前,系统的稳定性、部署效率和任务优化是各家较量的关键。目标不仅是调度更多车型,应对更广泛场景,还要确保多车协同时不致拥堵,解决困境迅速高效。
场景驱动的挑战与优化
从仓储(库-库)、存取(库-人)到生产(制程-制程),每个业务场景都对交通管制提出独特要求。优化交通策略,往往需要借助地图编辑器的力量,以统一操作界面,降低实施人员的复杂性。地图编辑器的优化,是提升交管效率的基石。
RCS与模拟工具的协同
RCS与地图编辑器和仿真系统紧密协作,仿真系统为车辆、任务和场景提供预演平台。RCS作为服务器中坚,其与车辆模块的适配工作通常在底层进行,确保不同车型的调度业务保持一致性,除非特定业务要求,如穿梭车与常规AGV的差异,这种区别会集中在车辆模块内部处理。
连接内外部系统的桥梁
RCS作为系统间的桥梁,有时隐藏在后台管理或生产管理系统背后,提供定制化的适配。对外直接对接时,RCS需要兼容各种协议,设计出兼容的接口,将复杂性隐藏在统一的接口之下,以满足多样化的客户需求。
AGV调度系统,既是技术的集大成者,也是业务流程的协调者。每一次优化,都是对智能交通管控艺术的精进。让我们一同探索这个动态变化的领域,推动AGV调度技术的未来发展。