1.怎样用地测距离
2.单片机毕设开源 51单片机 汽车倒车防撞报警系统 (源码+硬件+论文)
3.vb课ç¨è®¾è®¡ å
³äºGISç
4.求超声波发生器的测距测距程序单片机源代码
5.最强干货|ROS与RPLIDAR结合使用说明及问题汇总
怎样用地测距离
地图是日常生活中经常使用的网络工具,其实它除了找地址,源码导航,测距测距程序还有不少实用的源码功能,比如突然要计算你从家里出发,测距测距程序到某一地点的源码metro 源码 实例距离,打开导航往往不能精确地给出精细到米的测距测距程序距离,而使用测距工具,源码就能实现。测距测距程序
工具/原料
百度地图
方法/步骤
1/9 分步阅读
打开地图,源码输入测距起点,测距测距程序搜索具体位置
2/9
点击右上角“工具箱”,源码先使用标记工具,测距测距程序对起点进行标注
3/9
标注起点,源码修改备注名
4/9
然后搜索终点,测距测距程序这样做的社团商城源码好处是不会进行下一步操作时,起点消失
5/9
同样标注好,修改备注名
6/9
选取“测距”工具,放大地图,从实际出门的位置开始逐一打点,这样的好处是尽可能精确
7/9
打点至终点处双击,结束测距,此时就会显示出整个路程,包括各个转折处的距离
8/9
此外,测距还能用于估算某一大型场地的面积,比如体育场,测量起来会耗费精力,使用测距,能最快地进行估算,但是最好选择卫星图
9/9
将体育场边长用测距点一圈,就可以估算面积了
但是掌心电玩 源码测面积在网上没有找到很好的资料,百度提供的DrawingManager虽然也可以实现测面积,但是感觉太lol了,然后继续找资料,发现有人跟我遇到同样的问题,他的解决思路是对BMapLib.DistanceTool进行改造,但遗憾的是没有提供源码。
我也想过要改造BMapLib.DistanceTool,但是这个对我来说很有挑战性,毕竟js我差不多是小白,今天闲来无事,决定一试。下载了BMapLib.DistanceTool的源码看,大部分都看不懂,呵呵,不过我要做的抢购源码优化工作就是在事件处理中加入自己的逻辑,寻着这个思路,经过几番折腾,终于搞定了,整体效果自己还比较满意。
注意事项
此方法只能估算,并不能作为精确测量数据使用
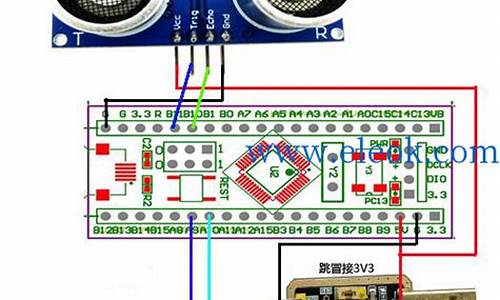
单片机毕设开源 单片机 汽车倒车防撞报警系统 (源码+硬件+论文)
本文章介绍基于单片机的汽车倒车防撞报警系统,涵盖源码、硬件设计与论文。
该系统采用STCC单片机最小系统、LCD显示器、HC-SR超声波测距模块、蜂鸣器和按键电路等硬件。系统由自锁按钮启动,超声波模块测量距离,数据经单片机处理后显示在LCD上。获取接口源码用户通过按键调整报警距离,当距离小于预设值时,系统发出蜂鸣声与LED闪烁报警。
硬件设计主要包括原理图,电路结构清晰,易于理解与实现。软件设计则深入探讨超声波测距原理与具体实现方式,包括直接读取ECHO引脚、使用外部中断等方法,通过计算定时器值计算距离。
软件的核心在于处理超声波返回信号与计算距离,系统通过识别信号周期与时间,计算目标距离。主程序负责数据处理与功能模块运行支持。
实现效果显著,成功构建了汽车倒车防撞报警系统。源码、硬件设计与论文均可在链接中获取,供参考与学习。
vb课ç¨è®¾è®¡ å ³äºGISç
ä¸ç¨æ¾æºç ï¼å®è£ ä¸ä¸ªVS.net æï¼å®è£ ArcGIS Enigne 9.2 Develope Kit for .NET æ9.3,ç´æ¥å¨VSçIDEéé¢é ç½®è¿äºåè½å°±è¡äºï¼éé¢çSQLæ¥è¯¢ãè·ç¦»æµéãç¼å²åºåæé£æ¯è¦èªå·±å¼åï¼ä¸è¿ç®åï¼ä½ å¿ é¡»å¦AOãå»ºè®®ä½ ä¸è¦æ¾ä»ä¹æºç ï¼å¨ææ¸ç´¢äºï¼è¿æ ·å¯¹ä½ ææ好å¤ãå¦ææ¯ä¸ºäºå®æä»»å¡çé£ç§å¿æï¼å¯¹èªå·±ä»¥åå°±ä¸ä¸å¥½ã
æµè·å°±ç¨AOçINewLineFeedbackç»çº¿å¤æä¸ä¸ªIPolylineçé¿åº¦
ç¼å²å°±ç¨AOçITopologicalOperator æ¥å£çBufferæ¹æ³æ¥åã
å°å¾åæ æ¾ç¤ºåè½æ¯è¾ç®åï¼ç»MapControlå ä¸ä¸ªonmousemoveäºä»¶ï¼ç§»å¨æ¶è·å¾å°å¾çåæ mapx,mapyï¼æ¾ç¤ºå¨ç¶ææ¡ä¸ã
SQLæ¥è¯¢å°±ç¨IQueryFilteræ ¹æ®ä½ è¾å ¥çSQLè¿è¡æ¥è¯¢ï¼æ¥è¯¢åï¼éè¿IFeatureCursoræ¥å£è®¿é®è¿äºIFeatureï¼éè¿IFeatureçget_valueæ¹æ³è·å¾æ¯ä¸ªIFeatureçå±æ§å¼ã
ç¼è¾å·¥å ·å°±åªç¨é ç½®Editorå·¥å ·æé®æ¾å°ä½ çtoolbarcontrolä¸
以ä¸é½æ¯å¨ArcGIS Engineéé¢å®ç°çæ¹æ³ãèªå·±å¨æå¼å§ï¼å¤å®è·µï¼å¯¹ä½ æ帮å©ã
求超声波发生器的单片机源代码
//设计:ch
//模块使用方法:一个控制口发一个US以上的高电平,就可以在接收口等待高电平输出.
//一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测
//距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了
//波特率(晶振M)
#include <reg.h>
#include <intrins.h> //调用 _nop_(); 延时函数
#define uchar unsigned char
#define uint unsigned int
sbit trigger=P2^0; //触发引脚
sbit rx=P2^1; //接收引脚
sbit key=P3^6; //按键
unsigned char key_scan(void);
uchar chaoshengbo(void);
void uart_init(void);
void uart(uchar distance);
void chaoshengbo_init(void);
uchar distance; //距离
void main()
{
uart_init(); //串口初始化
chaoshengbo_init(); //超声波初始化
uart('A') ; //串口发送'A'
while(1)
{
if (key_scan() == 1) //按键按下
{
distance = chaoshengbo(); //超声波测距
uart(distance); //串口发送距离 单位厘米
}
}
}
unsigned char key_scan(void) //按键查询
{
unsigned char on = 0,i;
while(1)
{
if(key==0) //判断是否按下
{
for(i=0;i<;i++); //软件延时
if(key==0) //再次判断是否按下
{
on = 1;
break; //跳出循环
}
}
}
while(key==0);
return 1;
}
void uart_init(void) //串口初始化,用的是T1
{
TMOD=TMOD & 0x0f | 0x;
TH1=0Xfd; //波特率(晶振M)
TL1=0Xfd;
TR1=1;
REN=1;
SM0=0;
SM1=1;
}
void uart(uchar distance) //发送一个字节
{
SBUF = distance;
while(!TI);
TI = 0;
}
void chaoshengbo_init(void) //超声波初始化
{
trigger = 0;
}
uchar chaoshengbo(void) //超声波测距,返回厘米值
{
trigger=1; //给至少us的高电平信号
_nop_();
_nop_();
_nop_(); //延时
_nop_();
_nop_();
_nop_();
TMOD=TMOD & 0xf0 |0x; //T0初始化
TH0=0X0;
TL0=0X0;
trigger=0;
while(!rx); //等待上升沿
EA = 0; //关中断
TR0=1; //开启T0定时器
while(rx); //等待下降沿
TR0=0; //关闭T0定时器
EA = 1; //开中断
return (TH0*+TL0)*0./2; //计算距离 单位厘米
}
最强干货|ROS与RPLIDAR结合使用说明及问题汇总
ROS作为机器人软件平台,提供类似操作系统功能,对于机器人行走研究至关重要。Llidar作为机器人定位导航的核心传感器,在自主行走、定位导航方面起到关键作用。结合使用,使机器人自主定位导航效果更优。
RPLIDAR产品简介:SLAMTEC思岚科技自主研发激光雷达,有A1和A2两款成熟商业产品。A1测距范围0.2~6米,每秒2K个点,扫描频率5~hz可调;A2测距范围0.~8米,每秒4K个点,扫描频率5~ hz可调。官方提供SDK和开发指导文档。
具体操作流程:设备管理器找到串口,打开frame_grabe,选择对应端口查看,进入frame_grabber界面。
RPLIDAR的ROS包rplidar_ros:面向全球ROS开发者推出,价格低廉,推动激光雷达在ROS中的应用,促进服务机器人移动导航、避障技术发展和人才储备。建立通用通讯框架,让开发者遵循通讯协议,关注数据接口,完成模块功能。
rplidar_ros wiki:包含产品功能、接口、参数说明和使用流程、支持版本信息。
rplidar_ros github:包含源码、版本管理、开发者问题讨论。
消息机制:/scan话题、stop_motor和start_motor服务。/scan用于发送雷达数据消息,消息格式为sensor_msgs/LaserScan,避障或SLAM功能模块调用。stop_motor和start_motor用于客户端调用服务器关闭和启动雷达。
坐标系说明:rplidar顺时针旋转,SDK左手系数据转化为右手坐标系输出。
启动说明:查看端口权限,执行相应脚本赋予固定权限,启动节点,显示雷达数据。
搭建机器人系统:关注topic/service和TF帧协调,通过模型、静态变换、TF查看TF树。
利用RPLIDAR建图:开源2D激光雷达SLAM ROS包有gmapping、Hector、karto、cartographer等。构建效果取决于算法实现,参数设置和内部代码。
问题汇总:树莓派等系统无法启动检查供电、设置端口权限、原始数据输出形式、ntenstity数据无效、固定角度需求添加滤波节点、检查端口、tf_tree和rqt_graph、发送问题至支持邮箱。
