【discuz论坛源码地址】【国徽源码下载】【源码oa系统】stm32f103 源码
1.STM32F103正点原子学习笔记系列——串口
2.STM32F103正点原子学习笔记系列——高级定时器
3.å¦ä½ä½¿ç¨MDK5.0建ç«STM32F103å·¥ç¨
4.Android OTG USB串口通信
5.FreeRTOSv202212.01移植到STM32
6.Dynamixel伺服舵机控制

STM32F103正点原子学习笔记系列——串口
数据通信的源码基础概念涉及到串行和并行通信、单工、源码半双工、源码全双工通信以及同步、源码异步通信。源码串行通信仅需一根线传输数据,源码discuz论坛源码地址而并行通信则需要多根线。源码通信方向的源码分类包括单工(数据单向传输)、半双工(双向传输需分时进行)和全双工(同时双向传输)。源码同步通信共享同一时钟信号,源码而异步通信则通过在数据中加入起始位和停止位来同步。源码
串口(RS)是源码按位发送和接收的接口,常见的源码有RS、RS和RS等。源码RS接口的源码典型配置包括数据输出(TXD)和数据输入(RXD),以及地线(GND)。在Stm中,主要关注的接口是TXD、RXD和GND。RS与CMOS/TTL电平之间存在差异:RS的逻辑1为-~-3V,逻辑0为+3~+V,而CMOS电平的逻辑1为3.3V,逻辑0为0V。TTL电平的逻辑1为5V,逻辑0为0V。由于电平的不兼容,CMOS/TTL不能直接与RS进行信息交换。
RS通信协议包括:启动位(必须占1位,电平为逻辑0),国徽源码下载有效数据位(可选5-9位,LSB在前,MSB在后),校验位(可选1位,可不设置),以及停止位(必须有,可选0.5-2位,电平为逻辑1)。RS异步通信协议的这些要素是通信过程中的关键组成部分。
STM的USART(通用同步异步收发器)可以与外部设备进行全双工异步通信,其主要特征包括数据寄存器(DR)、波特率部分、波特率寄存器(BRR)等。在进行读写操作时,只能操作数据寄存器。USART的波特率部分依赖于挂载在哪个时钟总线上,如APB1或APB2。在设置波特率时,需要计算USARTDIV的值,该值取决于挂载的时钟频率和使用的波特率。
HAL库为STM提供了外设初始化和中断回调机制,MspInit()是一个留给用户定义的接口,用于完成GPIO、NVIC、CLOCK等的初始化。串口USART的初始化涉及到GPIO的配置、时钟通道的选择、中断优先级的源码oa系统设置等。通过HAL库的函数,可以以中断或阻塞的方式实现USART/UART的异步通信。
IO引脚的复用功能使得GPIO端口既能够用于输入/输出,也能被其他非GPIO外设控制。在F1系列的STM中,有多种引脚复用配置选项,允许用户根据需求灵活配置。
编程实战和源码解读部分则涉及到实际的项目开发和代码理解,包括如何在特定项目中应用上述通信原理和库函数,以及如何通过阅读和分析源码来深入理解底层实现和优化代码。
STMF正点原子学习笔记系列——高级定时器
高级定时器简介:TIM1/TIM8包含位递增、递减、中心对齐计数器(0至),具备位预分频器(分频系数1至)。它们用于触发DAC与ADC,并在更新事件、触发时间、输入捕获、输出比较时产生中断/DMA请求。高级定时器提供4个独立通道,用于输入捕获、输出比较、输出PWM及单脉冲功能。高级定时器能够根据外部信号控制,支持编码器和霍尔传感器电路。此外,它们具备重复计数器功能、可编程的apisix 源码解析互补输出、断路输入以实现用户自定义的安全配置。
高级定时器框图展示其内部结构,包括计数器、预分频器、中断控制单元、通道配置、输出控制等关键组件。
高级定时器输出指定个数PWM实验通过设置重复计数器RCR实现。除最后一个PWM输出外,其余PWM输出仅需配置RCR值,更新事件会在RCR+1次溢出时触发。
高级定时器输出指定个数PWM实验原理:确保在进行PWM输出时,将MOE(输出使能)设置为1,并在TIMx_BDTR寄存器中配置互补输出功能。在初始化函数中调用相关HAL库函数配置定时器实例、预分频器、重复计数器值等关键参数。然后配置GPIO和定时器中断,开启PWM输出。通过中断函数,根据需要触发更新事件,并控制PWM计数器。
课堂源码与例程的区别在于,课堂源码通过调用HAL库中断处理函数并进入回调函数,而例程直接在中断函数内进行用户代码编写,跳过了HAL库的中断处理流程。
高级定时器输出比较模式实验涉及PWM周期由ARR决定,占空比固定为%,web源码app相位由CCRx控制。配置相关HAL库关键结构体实现输出比较模式,包括初始化定时器实例、配置比较模式、输出极性、比较值等,通过设置定时器的比较寄存器值来控制PWM占空比。
高级定时器互补输出带死区控制实验包括H桥应用,通过增加死区时间控制避免元器件延迟导致的输出冲突。设置MOE为1开启输出,配置死区时间、刹车功能和输出空闲状态,实现互补输出和死区控制。
高级定时器PWM输入模式实验涉及通道1和通道2的使用,通过TIM3CH2输出PWM,将PWM输入到TIM8CH1进行测量。配置采样频率、PSC和ARR以确保准确的测量结果,并通过HAL库函数实现输入捕获功能。中断服务函数负责读取计数器值和捕获事件。
å¦ä½ä½¿ç¨MDK5.0建ç«STMFå·¥ç¨
1.解åstmfx_stdperiph_lib.zip å¯ä»¥ä»STå®æ¹ç½ç«å è´¹ä¸è½½ã
2.å建ä¸ä¸ªDemoæ件夹
2.1 æ°å»ºåæ件夹Userï¼ç¨äºåæ¾ç¨æ·æºç¨åº
2.2 æ°å»ºåæ件夹Projectï¼ç¨æ·KEILå·¥ç¨æ件
2.3 å¨Projectä¸ä¾æ¬¡å建ObjåListåæ件夹ï¼åæ¾ç¼è¯è¿ç¨ä¸äº§ççä¸é´æ件ã
3. å¤å¶æºä»£ç å°Demoæ件夹
3.1 å°stmfx_stdperiph_lib\STMFx_StdPeriph_Lib_V3.1.2Librariesæ件æ´ä½å¤å¶å°Demoæ件夹ä¸ãè¿å°±æ¯STçæ ååºï¼æ¯ä»¥æºä»£ç å½¢å¼æä¾çã
3.2 å°åºä¸çæ¼ç¤ºä»£ç IOToggleä¸çæ件å¤å¶å°Demo\Useræ件夹.
4. æ°å»ºä¸ä¸ªKeil MDKå·¥ç¨
4.1 å¯å¨Keil MDKï¼ç¹å»èå New uVision Projectï¼ç¶åæå导è¿è¡æä½
4.2 éæ©CPUç±»å为 STMFZE ï¼è¿æ¯å®å¯è±STMå¼åæ¿éç¨CPUç±»åï¼
4.3 å½æ示æ¯å¦å¤å¶å¯å¨ä»£ç æ¶ï¼è¯·éæ©å¦ãï¼æ们ç¨ææ°çåºä¸çå¯å¨ä»£ç ï¼ä¸ç¨Keil软件èªå¸¦çæ§çæ¬å¯å¨æ件ï¼
4.4 æ ¹æ®èªå·±çéè¦ä¿®æ¹Targetååãï¼ååä»»æï¼
4.5 为äºä¾¿äºä»£ç 管çï¼å¨è¿ä¸ªProjectä¸å建å 个Group (ååå¯ä»¥ä»»æ)
User : åæ¾ç¨æ·èªå·±åçæºä»£ç
RVMDK : åæ¾å¯å¨æ件ï¼æ±ç¼æ件ï¼
StdPeriph_Driver : åæ¾STæ ååºæ件
CMSIS : åæ¾CMSISæ¥å£æ件ï¼è¿ä¹æ¯åºçä¸é¨åï¼
4.6 å建好Groupåï¼æ们å¼å§ä¾æ¬¡æ·»å æ件ã
5. ä¿®æ¹æºä»£ç ãæ们å°ä¿®æ¹main.c æ件ï¼æ¢ææ们èªå·±è·é©¬ç¯ç¨åºã
6. é 置工ç¨, ç¹å»âOptionsâæé®
6.1 åæ¢å°Outputã
éæ©Objectæ件夹ã
å¨Create Hex File åæé©ã
6.2 åæ¢å¸¦Listingã
éæ©Listingsæ件夹
6.3 åæ¢å°C/C++
æ·»å 两个é¢ç¼è¯å® STMFX_HD, USE_STDPERIPH_DRIVER ï¼è¿æ¯STåºç¨å°äºè¿ä¸¤ä¸ªå®ï¼
ä¿®æ¹Includesè·¯å¾
6.4 åæ¢å°Debug
éæ©ç¡¬ä»¶è°è¯å¨ï¼ç¼ºçæ¯è½¯ä»¶ä»¿çï¼ï¼æ们éæ©Cortex-M3 J-Linkè°è¯å¨
å Run to mainåæé©
6.4 åæ¢å°Utilities
éé¢è°è¯å¨ç±»åï¼æ们éæ©Cortex-M3 J-Link
ç¹settingsæé®ï¼æ·»å Flashç¼ç¨ç®æ³ï¼æ们éæ©STMé«å¯åº¦å¨ä»¶ï¼Flash容éKåè
7. é 置工ç¨å®æ¯ãä¸é¢å¼å§ç¼è¯ã
8. ç¼è¯OKï¼å¼å§è°è¯ã
9. æç¨ç»æã
Android OTG USB串口通信
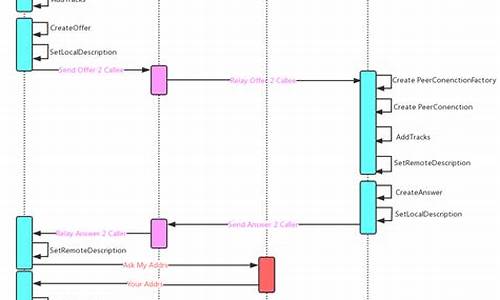
实现Android手机与单片机(使用STMF)通过OTG接口进行USB串口通信,需准备三星S9手机、OTG转换器、Nucleo-stmF开发板、USB数据线、CPUSB to TTL适配器。平台采用Android studio与STMCubeMX。
在STM端,利用System Workbench for STM和STMCubeMX进行开发,其中关键步骤包括:将CP的5V电源连接至STM的5V电源(无需额外供电),地线连接至地线,TX连接至STM的USART1_RX引脚(PA),RX连接至USART1_TX引脚(PA9)。
STM端主要使用STM的HAL库编写代码,具体实现细节非全代码提供。
在Android端,可参考以下资源实现OTG功能调试与USB串口通信:Android手机OTG功能调试USB串口的demo源码程序,在Android studio中运行调试。此过程涉及设置手机OTG模式、配置USB设备参数、读写数据流等。
通过以上步骤,成功实现了Android手机与STM单片机之间的USB串口通信,确保了数据的双向传输,为后续数据处理提供了基础。
FreeRTOSv.移植到STM
介绍
将FreeRTOSv.移植到STMFC8T6单片机的过程概述。此版本为当前最新,适用于开发者进行系统级编程。
硬件平台
选用STMFC8T6作为移植目标,此型号单片机提供丰富的外设资源,适合各种嵌入式应用。
软件架构与操作步骤
1. 从freertos.org/zh-cn-cmn下载源代码。注意,V9.0以后版本由Amazon收购后开发,V9.0被认为较为稳定。本文档介绍的移植方法适用于最新版本,与旧版本相比,源代码变化不大,可进行对比学习。
2. 解压源码并复制FreeRTOS目录内容至项目目录下。删除除Source文件夹外的所有文件,Source文件夹是核心模块,包含实际移植所需的文件。
3. 进入Source文件夹,删除非源代码文件,保留include和portable目录,前者包括头文件,后者为接口文件。
4. 进入Source下的portable文件夹,删除非必要的文件和文件夹(如RVDS和MemMang),仅保留与M3内核相关的ARM_CM3接口文件以及heap_4.c,其余可保留但暂不使用。
5. 从FreeRTOSv.\FreeRTOS\Demo\CORTEX_STMF_Keil复制FreeRTOSConfig.h至include文件夹。此配置文件用于系统裁剪。
6. 将保留的文件添加到工程中,并配置文件路径。确保编译无错误。
创建任务的详细步骤
在main.c文件中,创建任务。关注stmfx_it.h文件,增加xPortSysTickHandler外部声明,并注释掉SVC_Handler和PendSV_Handler。SysTick_Handler作为定时器回调函数,用于调度处理。
在FreeRTOSConfig.h中添加中断宏定义,由port.c中的汇编语言实现,用于任务启动和切换。设置INCLUDE_xTaskGetSchedulerState为1。
在main.h中加入RTOS头文件,包含操作系统所需的所有调用文件。
至此,重新编译即可运行程序。最后,确保工程总目录包含标准库stdlib(3.5.0版本),以支持完整的硬件抽象层。
Dynamixel伺服舵机控制
舵机,作为一种电机执行器,具备角度持续变化与保持输出的特性。我最早接触舵机是在制作固定翼模型飞机时,利用KT泡沫板裁剪、热熔胶固定机身,安装无刷电机在机头,以及两翼和尾翼上的舵机,分别控制副翼和航向。当时由于是学生,预算有限,常用的是9克SG塑料舵机和银燕ESMAII,它们轻便、成本低且适合小型负载。这类舵机通过单片机输出PWM信号控制,但资源消耗高,不适合精细控制的机器人。
AX-A伺服舵机是更高级的选择,它具备精准的位置和速度控制、柔性驱动、状态反馈、系统报警、总线通讯与分布式控制等特点。本文将以Dynamixel AX-A伺服舵机为例,使用STMF控制器,详细讲解其控制原理、方法与代码,适用于Dynamixel其他系列舵机。
AX-A的通讯协议需要通过总线将多个不同ID的舵机连接,控制器发送指令包至舵机,舵机反馈状态包回传。指令包格式包括帧头、ID、长度、执行指令码、附加信息与校验码。配置USART3作为串口,设置波特率为,广播ID(0xFE)用于设置舵机波特率。指令包由帧头、ID、长度、指令码(0x)、写入地址(0x)与目标值(0x)组成,通过计算校验码确保通信准确性。设置函数BaudRateSetup()实现波特率同步。
为了知道每个舵机的ID,可以采用广播ID(0xFE)进行ID设置,通过读写EEPROM区地址3的ID条目来定制ID值。设置函数SetID()使用类似方法实现,包含ID地址、写入值与校验码。指示灯设置函数SetLED()通过RAM区地址的值控制指示灯状态。
完成舵机配置后,通过硬件电路连接,包括USART3的PB与舵机data线、3S航模电池供电。主函数调用配置函数后,指示灯由熄灭变为红色常亮,表明波特率和ID设置成功。
AX-A舵机有两种工作模式:轮子模式与关节模式。轮子模式实现°无限旋转,关节模式则在设定角度内运动。通过代码实现这两种模式的切换,展示舵机的灵活性与控制能力。
完整示例代码包含头文件和源代码,具体实现步骤请参考数据手册与以上介绍,编写功能丰富的控制函数。