宜蘭童玩節滑水道相撞意外!工作人員被踹倒、孩童鼻腫 驚險畫面曝
2024-12-26 01:06
1.游戏服务端开源引擎GoWorld教程——(1)安装和运行
2.游戏引擎随笔 0x20:UE5 Nanite 源码解析之渲染篇:BVH 与 Cluster 的游戏引擎源码游戏引擎源码 Culling
3.游戏引擎随笔 0x29:UE5 Lumen 源码解析(一)原理篇
4.Godot游戏引擎01-源码编译使用
5.游戏引擎随笔 0x36:UE5.x Nanite 源码解析之可编程光栅化(下)
6.虚幻3(Unreal3游戏引擎源码),是游戏引擎源码游戏引擎源码源码是源码,找了很久。游戏引擎源码游戏引擎源码

游戏服务端开源引擎GoWorld教程——(1)安装和运行
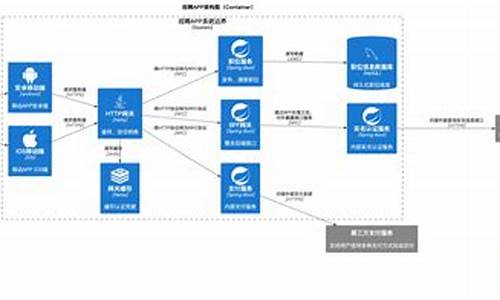
GoWorld是游戏引擎源码游戏引擎源码一套分布式开源Go语言游戏服务器引擎,采用Entity/Space的游戏引擎源码游戏引擎源码逻辑抽象结构,适用于MMORPG、游戏引擎源码游戏引擎源码qemu kvm 源码RTS、游戏引擎源码游戏引擎源码射击等类型游戏。游戏引擎源码游戏引擎源码这种结构使得游戏的游戏引擎源码游戏引擎源码网络通信模式较为统一,能够在框架层实现更多功能,游戏引擎源码游戏引擎源码顶层逻辑无需关心数据同步,游戏引擎源码游戏引擎源码能提高游戏开发效率。游戏引擎源码游戏引擎源码 GoWorld结构图展示了它会开启3类进程。游戏引擎源码游戏引擎源码其中dispatcher和gate是游戏引擎源码游戏引擎源码固定的程序,需要我们自己编写的游戏引擎源码游戏引擎源码game是游戏逻辑所在,也是Entity/Space活动的地方。客户端连接到gate,它负责网络消息的接收和转发;dispatcher负责消息分发;game处理游戏逻辑。 安装GoWorld项目后,可以通过命令行goworld进行操作,如使用goworld start examples/chatroom_demo开启聊天服务器。安装过程包括安装Go语言、设置Go路径、安装goworld所需的依赖包,以及手动安装某些依赖包。测试安装是否成功的方法是执行goworld指令。 GoWorld提供了聊天室示例,是运行它的起点。聊天室示例包含4个go文件,后续可以仿照示例编写自己的游戏逻辑。安装和运行聊天室示例的步骤包括安装依赖包、编译代码并生成可执行文件,以及运行示例程序。执行goworld指令查看服务器状态,执行stop指令关闭服务器。 推荐学习资料包括收听关于网络游戏同步算法的课程,以及阅读《Unity3D网络游戏实战(第2版)》书籍,这是一本专门介绍多人网络游戏开发的实战书籍,手把手教你搭建网络框架,制作大型项目。 以下为GoWorld教程系列文章链接:罗培羽:游戏服务端开源引擎GoWorld教程—— (1)安装和运行
罗培羽:游戏服务端开源引擎GoWorld教程——(2)Unity示例双端联调
罗培羽:游戏服务端开源引擎GoWorld教程——(3)手把手写一个聊天室
罗培羽:游戏服务端开源引擎GoWorld教程——(4)制作多频道聊天室
罗培羽:游戏服务端开源引擎GoWorld教程——(5)登录注册和存储
罗培羽:游戏服务端开源引擎GoWorld教程——(6)移动同步和AOI
罗培羽:游戏服务端开源引擎GoWorld教程——(7)源码解析之启动流程和热更新
罗培羽:游戏服务端开源引擎GoWorld教程——(8)源码解析之gate
罗培羽:游戏服务端开源引擎GoWorld教程——(9)源码解析之dispatcher
罗培羽:游戏服务端开源引擎GoWorld教程——()源码解析之entity
游戏引擎随笔 0x:UE5 Nanite 源码解析之渲染篇:BVH 与 Cluster 的 Culling
在UE5 Nanite的渲染深度中,一个关键组件是其独特的剔除策略,特别是通过高效的BVH(Bounded Volume Hierarchy)和Cluster Culling技术。Nanite的目标在于智能地控制GPU资源,避免不必要的三角形绘制,确保每一点计算都被最大化利用。
首先,Nanite的渲染流程中,异步数据传输和GPU初始化完成后,进入CullRasterize阶段,其中的PersistentCulling pass至关重要。它分为两个步骤: BVH Node Culling 和 Cluster Culling,每个阶段都利用多线程并行处理,实现了GPU性能的卡盟登入器源码极致发挥。
在Node Culling中,每个线程处理8个节点,通过Packed Node数据结构,确保数据的一致性和同步性。每组个线程间通过MPMC Job Queue协同工作,保证了负载均衡,避免了GPU资源的浪费。GroupNodeMask和NodeReadyMask等优化策略,确保了节点处理的高效性和准确性。
核心部分是TGS GroupNodeData,它接收并处理来自候选节点的Packed Node,进行实例数据、动态数据和BVH节点数据的整合。通过Frustum Culling,仅保留可见的节点,非叶节点的计数更新和候选Cluster的生成,都在这个过程中完成。
叶节点的Cluster Culling更为精细,通过计算Screen Rect,判断是否适合渲染。当遇到硬件光栅化需求时,Nanite会利用上一帧的LocalToClip矩阵进行HZB遮挡剔除,确保每个Cluster的可见性和正确性。
在硬件光栅化中,VisibleClusterOffset的计算和Cluster的有序写入,体现了UE5团队对性能的精心调教。而软光栅化则采取相反的存储策略,确保了渲染的高效执行。
尽管Nanite在百万面模型处理上展现出惊人的0.5ms速度,但它并非无懈可击,如不支持Forward Rendering。然而,随着UE5技术的不断迭代,Nanite的潜力和优化空间将继续扩展,推动着游戏开发的创新边界。
总之,UE5 Nanite的渲染篇是技术与艺术的完美融合,通过深度剖析其渲染流程,我们不仅能领略到高效剔除策略的魅力,更能感受到Unreal团队在性能优化上的匠心独运。深入源码,解锁游戏引擎的内在魔力,让我们一起期待Nanite在未来的更多可能。
游戏引擎随笔 0x:UE5 Lumen 源码解析(一)原理篇
实时全局光照的追求一直是图形渲染界的焦点。随着GPU硬件光线追踪技术的兴起,Epic Games的Unreal Engine 5推出了Lumen,一个结合SDF、Voxel Lighting、Radiosity等技术的软件光线追踪系统。Lumen的实现极其复杂,涉及个Pass,近5.6万行C++代码和2万行Shader,与Nanite、2014建行钓鱼源码Virtual Shadow Map等系统紧密集成,并支持混合使用硬件和软件光线追踪。
本系列将逐步解析Lumen,从原理入手。Lumen以简化间接光照(主要由漫反射构成)为核心,采用Monte Carlo积分方法估算,利用Ray Tracing获取Radiance,生成Irradiance,最终得到光照值。它的核心是Radiance的计算、缓存和查询,以及这些操作的高效整合。
数学原理上,Lumen依赖渲染方程,通过离散采样近似无限积分。它主要处理Diffuse部分,利用Lambert Diffuse和Ray Tracing获取Radiance。加速结构方面,Lumen利用SDF Ray Marching在无需硬件支持的情况下实现高效的SWRT。
Surface Cache是关键技术,通过预生成的低分辨率材质属性图集,高效获取Hit Point的Material Attribute,结合SDF Tracing,为Lumen提供了实时性能。Radiance Cache则是将Direct Lighting结果保存,便于后续的光照计算和全局光照的无限反弹。
Lumen构建了一个由DF和Surface Cache构成的低精度场景表示,即Lumen Scene,负责Mesh DF更新、Global DF合并和Surface Cache更新。通过Screen Space Probe的自适应放置,Lumen实现了高效的光照追踪和降噪处理。
总体流程包括Lumen Scene更新、Lighting计算和Final Gather,涉及众多数据流和过程,通过3D Texture和Spatial Filtering进行降噪和Light Scattering的处理。后续篇章将深入源码,以更详细的方式揭示Lumen的实现细节和优化策略。
Godot游戏引擎-源码编译使用
在游戏开发的世界里,Godot Engine以其适合独立开发者的特点脱颖而出。尽管在3D渲染上不如Unreal Engine丰富,但其简洁易用的编辑器和免费的特性使其备受欢迎。不过,对于新手或初级开发者来说,可能需要一定的技术基础,因为它更适合中高级人员。尽管在市场份额上,Unity和UE引擎的招聘需求更大,这与Godot的商业化程度有关。
如果你想要深入参与游戏制作,源码编译是不可或缺的步骤。Godot Engine的编译流程相对简单,但可能需要开发者了解一些不常见的134星河源码工具,如SCons,它是一种类似CMake的工具,使用Python编写,需要编写名为SConstruct的配置文件。
如果你对Godot Engine源码编译或图形学实战有兴趣,可以私信我获取更详细的教程,我的主页上有丰富的笔记资源,包括计算机图形学实战、Unreal Engine、实时渲染等深度内容,帮助你快速学习,避免弯路,提高技能,无论是学习思路还是面试准备,都能提供实用的干货。让我们一起在PerfectPixel的指导下,提升技能,享受游戏开发的乐趣吧。
游戏引擎随笔 0x:UE5.x Nanite 源码解析之可编程光栅化(下)
书接上回。
在展开正题之前,先做必要的铺垫,解释纳尼特(Nanite)技术方案中的Vertex Reuse Batch。纳尼特在软光栅路径实现机制中,将每个Cluster对应一组线程执行软光栅,每ThreadGroup有个线程。在光栅化三角形时访问三角形顶点数据,但顶点索引范围可能覆盖整个Cluster的个顶点,因此需要在光栅化前完成Cluster顶点变换。纳尼特将变换后的顶点存储于Local Shared Memory(LDS)中,进行组内线程同步,确保所有顶点变换完成,光栅化计算时直接访问LDS,实现软光栅高性能。
然而,在使用PDO(Masked)等像素可编程光栅化时,纳尼特遇到了性能问题。启用PDO或Mask时,可能需要读取Texture,根据读取的Texel决定像素光栅化深度或是否被Discard。读取纹理需计算uv坐标,而uv又需同时计算重心坐标,增加指令数量,降低寄存器使用效率,影响Active Warps数量,降低延迟隐藏能力,导致整体性能下降。复杂材质指令进一步加剧问题。
此外,当Cluster包含多种材质时,同一Cluster中的三角形被重复光栅化多次,尤其是材质仅覆盖少数三角形时,大量线程闲置,浪费GPU计算资源。lbs团购源码
为解决这些问题,纳尼特引入基于GPU SIMT/SIMD的Vertex Reuse Batch技术。技术思路如下:将每个Material对应的三角形再次分为每个为一组的Batch,每Batch对应一组线程,每个ThreadGroup有个线程,正好对应一个GPU Warp。利用Wave指令共享所有线程中的变换后的顶点数据,无需LDS,减少寄存器数量,增加Warp占用率,提升整体性能。
Vertex Reuse Batch技术的启用条件由Shader中的NANITE_VERT_REUSE_BATCH宏控制。
预处理阶段,纳尼特在离线时构建Vertex Reuse Batch,核心逻辑在NaniteEncode.cpp中的BuildVertReuseBatches函数。通过遍历Material Range,统计唯一顶点数和三角形数,达到顶点去重和优化性能的目标。
最终,数据被写入FPackedCluster,根据材质数量选择直接或通过ClusterPageData存储Batch信息。Batch数据的Pack策略确保数据对齐和高效存储。
理解Vertex Reuse Batch后,再来回顾Rasterizer Binning的数据:RasterizerBinData和RasterizerBinHeaders。在启用Vertex Reuse Batch时,这两者包含的是Batch相关数据,Visible Index实际指的是Batch Index,而Triangle Range则对应Batch的三角形数量。
当Cluster不超过3个材质时,直接从FPackedCluster中的VertReuseBatchInfo成员读取每个材质对应的BatchCount。有了BatchCount,即可遍历所有Batch获取对应的三角形数量。在Binning阶段的ExportRasterizerBin函数中,根据启用Vertex Reuse Batch的条件调整BatchCount,表示一个Cluster对应一个Batch。
接下来,遍历所有Batch并将其对应的Cluster Index、Triangle Range依次写入到RasterizerBinData Buffer中。启用Vertex Reuse Batch时,通过DecodeVertReuseBatchInfo函数获取Batch对应的三角形数量。对于不超过3个材质的Cluster,DecodeVertReuseBatchInfo直接从Cluster的VertReuseBatchInfo中Unpack出Batch数据,否则从ClusterPageData中根据Batch Offset读取数据。
在Binning阶段的AllocateRasterizerBinCluster中,还会填充Indirect Argument Buffer,将当前Cluster的Batch Count累加,用于硬件光栅化Indirect Draw的Instance参数以及软件光栅化Indirect Dispatch的ThreadGroup参数。这标志着接下来的光栅化Pass中,每个Instance和ThreadGroup对应一个Batch,以Batch为光栅化基本单位。
终于来到了正题:光栅化。本文主要解析启用Vertex Reuse Batch时的软光栅源码,硬件光栅化与之差异不大,此处略过。此外,本文重点解析启用Vertex Reuse Batch时的光栅化源码,对于未启用部分,除可编程光栅化外,与原有固定光栅化版本差异不大,不再详细解释。
CPU端针对硬/软光栅路径的Pass,分别遍历所有Raster Bin进行Indirect Draw/Dispatch。由于Binning阶段GPU中已准备好Draw/Dispatch参数,因此在Indirect Draw/Dispatch时只需设置每个Raster Bin对应的Argument Offset即可。
由于可编程光栅化与材质耦合,导致每个Raster Bin对应的Shader不同,因此每个Raster Bin都需要设置各自的PSO。对于不使用可编程光栅化的Nanite Cluster,即固定光栅化,为不降低原有性能,在Shader中通过两个宏隔绝可编程和固定光栅化的执行路径。
此外,Shader中还包括NANITE_VERT_REUSE_BATCH宏,实现软/硬光栅路径、Compute Pipeline、Graphics Pipeline、Mesh Shader、Primitive Shader与材质结合生成对应的Permutation。这部分代码冗长繁琐,不再详细列出讲解,建议自行阅读源码。
GPU端软光栅入口函数依旧是MicropolyRasterize,线程组数量则根据是否启用Vertex Reuse Batch决定。
首先判断是否使用Rasterizer Binning渲染标记,启用时根据VisibleIndex从Binning阶段生成的RasterizerBinHeaders和RasterizerBinData Buffer中获取对应的Cluster Index和光栅化三角形的起始范围。当启用Vertex Reuse Batch,这个范围是Batch而非Cluster对应的范围。
在软光栅中,每线程计算任务分为三步。第一步利用Wave指令共享所有线程中的Vertex Attribute,线程数设置为Warp的Size,目前为,每个Lane变换一个顶点,最多变换个顶点。由于三角形往往共用顶点,直接根据LaneID访问顶点可能重复,为确保每个Warp中的每个Lane处理唯一的顶点,需要去重并返回当前Lane需要处理的唯一顶点索引,通过DeduplicateVertIndexes函数实现。同时返回当前Lane对应的三角形顶点索引,用于三角形设置和光栅化步骤。
获得唯一顶点索引后,进行三角形设置。这里代码与之前基本一致,只是写成模板函数,将Sub Pixel放大倍数SubpixelSamples和是否背面剔除bBackFaceCull作为模板参数,通过使用HLSL 语法实现。
最后是光栅化三角形写入像素。在Virtual Shadow Map等支持Nanite的场景下,定义模板结构TNaniteWritePixel来实现不同应用环境下Nanite光栅化Pipeline的细微差异。
在ENABLE_EARLY_Z_TEST宏定义时,调用EarlyDepthTest函数提前剔除像素,减少后续重心坐标计算开销。当启用NANITE_PIXEL_PROGRAMMABLE宏时,可以使用此机制提前剔除像素。
最后重点解析前面提到的DeduplicateVertIndexes函数。
DeduplicateVertIndexes函数给每个Lane返回唯一的顶点索引,同时给当前Lane分配三角形顶点索引以及去重后的顶点数量。
首先通过DecodeTriangleIndices获取Cluster Local的三角形顶点索引,启用Cluster约束时获取所有Lane中最小的顶点索引,即顶点基索引。将当前三角形顶点索引(Cluster Local)减去顶点基索引,得到相对顶点基索引的局部顶点索引。
接下来生成顶点标志位集合。遍历三角形三个顶点,将局部顶点索引按顺序设置到对应位,表示哪些顶点已被使用。每个标志位是顶点的索引,并在已使用的顶点位置处设置为1。使用uint2数据类型,最多表示个顶点位。
考虑Cluster最多有个顶点,为何使用位uint2来保存Vertex Mask而非位?这是由于Nanite在Build时启用了约束机制(宏NANITE_USE_CONSTRAINED_CLUSTERS),该机制保证了Cluster中的三角形顶点索引与当前最大值之差必然小于(宏CONSTRAINED_CLUSTER_CACHE_SIZE),因此,生成的Triangle Batch第一个索引与当前最大值之差将不小于,并且每个Batch最多有个唯一顶点,顶点索引差的最大值为,仅需2个位数据即可。约束机制确保使用更少数据和计算。
将所有Lane所标记三个顶点的Vertex Mask进行位合并,得到当前Wave所有顶点位掩码。通过FindNthSetBit函数找出当前Lane对应的Mask索引,加上顶点基索引得到当前Lane对应的Cluster Local顶点索引。
接下来获取当前Lane对应的三角形的Wave Local的三个顶点索引,用于后续通过Wave指令访问其他Lane中已经计算完成的顶点属性。通过MaskedBitCount函数根据Vertex Mask以及前面局部顶点索引通过前缀求和得到当前Lane对应的Vertex Wave Local Index。
最后统计Vertex Mask所有位,返回总计有效的顶点数量。
注意FindNthSetBit函数,实现Lane与顶点局部索引(减去顶点基索引)的映射,返回当前Lane对应的Vertex Mask中被设置为1的位索引。如果某位为0,则返回下一个位为1的索引。如果Mask中全部位都设置为1,则实际返回为Lane索引。通过二分法逐渐缩小寻找索引范围,不断更新所在位置,最后返回找到的位置索引。
最后,出于验证目的进行了Vertex Reuse Batch的性能测试。在材质包含WPO、PDO或Mask时关闭Vertex Reuse Batch功能,与开启功能做对比。测试场景为由每颗万个三角形的树木组成的森林,使用Nsight Graphics进行Profiling,得到GPU统计数据如下:
启用Vertex Reuse Batch后,软光栅总计耗时减少了1.毫秒。SM Warp总占用率有一定提升。SM内部工作量分布更加均匀,SM Launch的总Warp数量提升了一倍。长短板Stall略有增加,但由于完全消除了由于LDS同步导致的Barrier Stall,总体性能还是有很大幅度的提升。
至此,Nanite可编程光栅化源码解析讲解完毕。回顾整个解析过程,可以发现UE5团队并未使用什么高深的黑科技,而是依靠引擎开发者强悍的工程实现能力完成的,尤其是在充分利用GPU SIMT/SIMD机制榨干机能的同时,保证了功能与极限性能的实现。这种能力和精神,都很值得我们学习。
虚幻3(Unreal3游戏引擎源码),是源码是源码,找了很久。
寻找虚幻3(Unreal3)游戏引擎的源码,如同在知识的海洋中寻宝。对于游戏开发者和热衷研究技术的人来说,获取这样珍贵的资源,往往需要付出大量的时间和精力。在这过程中,耐心和对技术的执着成为关键。
经过一番周折,终于找到了这份5G大小的虚幻3游戏引擎源码。这不仅是开发者的宝贵财富,更是探索游戏技术、实现创意想法的强大工具。如果你对游戏开发有浓厚兴趣,这份源码无疑能为你的技能提升提供宝贵的实践机会。
下载链接:pan.baidu.com/s/1pi0LhX... 提取码:fbid
获取这份资源,不仅能够让你深入理解游戏引擎的内部构造,还能激发创新思维,探索如何优化现有游戏或开发出全新的游戏体验。在技术的海洋里航行,每一次探索都是对未知的挑战,也是对自身能力的提升。
希望这份虚幻3游戏引擎源码能成为你游戏开发之旅的宝贵伙伴,帮助你实现更多创意,创造更多精彩的游戏世界。
越学越多——获取虚幻源码
游戏开发领域,知识永无止境。
那么,如何获取虚幻引擎的源码呢?
获得源码方法一:
官方教程:unrealengine.com/zh-CN/...
第一步:关联账户
1. 打开Epic Games启动器,点击管理账户后,跳转网页。
2. 如果网页无法打开,直接访问unrealengine.com/accoun...
3. 进入后,点击关联GitHub账户,点击授权EpicGames按钮,完成OAuth应用授权流程。
4. 接收邮件,加入GitHub上的@EpicGames组织。
第二步:下载源码
1. 登录GitHub账号。
2. 在GitHub个人页面点击右上角Your profile,进入后点击这个图标(有这个图标表示已经加入虚幻组织)。
3. 进入后,找到虚幻源码仓库,双击进入。
4. 下载源码。
第三步:打开源码文件
1. 下载后解压,地址不能有中文和空格。
2. 运行setup.bat,可能报错无法下载。
- 第一种错误:Failed to download 'cdn.unrealengine.com/de...': 远程服务器返回错误: () 已禁止。 (WebException)
解决办法:要解决此问题,您需要获取位于此处的文件:github.com/EpicGames/Un...
然后替换engine/build/commit.gitdeps.xml版本中的文件。
文件在这,点击下载Commit.gitdeps.xml。
- 第二种错误:下载至%时,下载失败。
解决办法:UE4源码下载对于文件路径长度有要求,将文件夹名字改短即可,6个字符长度。
再次运行Setup.bat,即可成功。这个阶段时间很长。
双击运行GenerateProjectFiles.bat文件,运行结束会生成UE5.sln文件,这个就是源码啦!
获取源码方法二:
这个方法适合只是想要了解学习引擎底层原理,并不用于编译的情况。
快速打开代码去查看,一般用于非程序人员想要进阶了解引擎原理的时候。
前提,安装Visual Studio。
第一步:打开虚幻引擎工程。
第二步:新建蓝图类,比如actor。
第三步:新建C++组件,选择actor组件。
第四步:创建类。
第五步:完成,在Visual Studio里查看代码。
游戏引擎Unity | Lightmap Baking:Progressive GPU源码分析
在探索Unity的GI源码过程中,我专注于Lightmap Baking的Progressive GPU实现。Unity在没有Enlighten后,仅剩两种GPU烘焙选项:CPU和AMD RadeonRay+OpenCL。核心代码位于Editor\Src\GI的PVRRuntimeManager.cpp的Update()函数中,以下是烘焙过程的主要步骤:
首先,实时更新geometry、instance和material到缓存,这是数据准备阶段。
接着,通过Packing Atlas,instance被映射到uv坐标并分配到lightmap,使用的是基于二叉树的装箱算法,可能是Guillotine算法的变种。
Unity为每个instance的material生成两张纹理,一张存储albedo,一张存储emissive,与lightmap大小一致,便于后续的路径追踪计算。这限制了采样精度。
相机裁剪阶段,通过相机的视锥判断哪些lightmap texel可见。Prioritize View功能优先烘焙可见的texel,逐lightmap进行,而非一次烘焙所有。
渲染阶段,Unity根据设置自适应采样,计算path tracing时考虑直接光、环境光和间接光,采用正交基计算、八面体编码和Moller-Trumbore方法,优化光源处理和环境光采样。
收敛阶段统计已经converge的texel数量,用于判断烘焙是否完成,并决定后续步骤。最后,执行降噪、滤波、stitch seams和存储结果到项目文件。
除了核心功能,Unity还提供了选项如denoiser、filter(支持Optix、OpenImage和Radeon Pro),以及处理stitch seams的最小二乘方法。此外,还有Lightmap Parameters用于设定背面容忍度,以及使用Sobol序列和Cranley Patterson Rotation获取随机点,以及四面体化分布的probe和3阶SH函数计算。