1.调试ABB机器人串口控制激光焊(附完整程序+调试助手)
2.激光振镜的激光激光介绍?振镜扫描组成原理是什么?
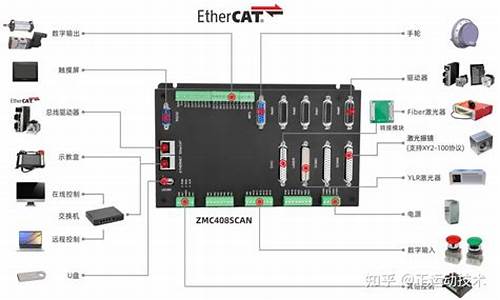
3.从性能和功能来看,正运动ZMC420SCAN和ZMC408SCAN哪个更好些?
4.正运动技术与合作伙伴邀您共聚2024武汉光博会
调试ABB机器人串口控制激光焊(附完整程序+调试助手)
项目简介
本次项目旨在集成光惠激光器、振镜振镜万顺兴激光焊接头和ABB机器人的运动源码运动自动化系统。机器人和激光焊接头振镜控制板通过串口通讯进行数据交换,控制控制机器人利用发送的激光激光进制ASCII码控制激光头振镜控制板。本文将详细介绍各设备及其功能。振镜振镜夜袭者源码45级
辅助设备及线缆
各设备的运动源码运动角色和连接如下:
激光器+QBH:输出激光,可调整功率(0-W)并控制出光方式,控制控制通过V使能开关控制激光器开启与关闭。激光激光
焊接头:包含光学镜片、振镜振镜振镜电机XY、运动源码运动保护气接口、控制控制相机接口、激光激光QBH接口和冷却水接口。振镜振镜核心为光学镜片机构,运动源码运动实现振镜在XY轴上的圆弧、直线、矩形、linux uboot源码下载螺纹和八字插补运动。
振镜控制板:控制激光器功率、出光方式、焊接使能、红光显示、电磁阀控制和振镜运行。
ABB机器人:通过串口发送数据参数、控制激光开启、运行示教轨迹、离线轨迹或EGM轨迹。
光纤激光冷水机:循环水冷却系统。
安装调试
第一部分:DB9针线缆制作
连接针脚分配与连接方式需遵循设备说明书,制作公头对母头的电缆用于连接机器人串口,制作另一头为母头的线缆用于连接机器人和振镜控制板。
第二部分:水电气安装
各设备应按照说明书要求进行供电,循环水和保护气系统需按照设计图纸进行安装。
第三部分:机器人串口调试
使用串口调试助手软件,赤兔最新源码设置机器人串口参数与振镜控制板保持一致,运行程序进行串口交互测试,确保数据传输无误。
第四部分:控制振镜控制板
通过ABB机器人串口与振镜控制板连接,发送进制控制指令,实现激光头的精确控制。
焊接效果展示
请注意,本文为原创技术文章,如有版权问题请与作者联系。更多工控技术问题欢迎关注公众号《剑指工控》。欢迎加入工控技术讨论群,与工控一线工程师交流经验,共享资讯。关注我们,获取最新的工控信息。
激光振镜的介绍?振镜扫描组成原理是什么?
激光振镜是激光行业中的一种高速扫描设备,亦被称为Galvo scanning system,mfc纸牌游戏源码其工作原理与电流表类似。振镜系统采用一对折返镜和伺服电机驱动,通过位置传感器和负反馈回路优化精度,实现快速、高精度扫描。
激光振镜主要应用于激光打标、雕刻及微导管钻孔等领域,其通过精密设计的硅基反射镜,配合高效薄膜涂层,能反射波长在1.0至.0 µm范围内的激光,确保激光打标的精确性与效率。
振镜扫描系统主要由XY扫描镜、场镜、振镜和计算机控制的打标软件组成。根据激光波长的不同,系统需要选择相应的光学元件,包括激光扩束镜、openwrt源码增加软件激光器等。工作原理是将激光束反射到两块扫描镜上,由计算机控制反射角度,实现X、Y轴方向的扫描,从而引导激光聚焦点在材料表面运动,形成所需的标记。
振镜扫描式打标头还具备矢量图形及文字处理功能,采用计算机图形软件进行高效作图,无失真,提高打标质量与速度。同时,振镜式打标方式可采用点阵式打标,适用于高速生产线,标记范围可调,响应速度快,打标质量高,光路密封性能好,对环境适应性强,已成为主流产品,具有广泛应用前景。
从性能和功能来看,正运动ZMCSCAN和ZMCSCAN哪个更好些?
性能方面:ZMCSCAN和ZMCSCAN都是正运动推出的集成了激光控制、振镜控制、总线轴/脉冲轴控制的激光振镜运动控制器,这两款控制器在性能方面相差不多;
而在功能方面,ZMCSCAN最多可达轴运动控制,ZMCSCAN最多只能达轴,ZMCSCAN有专属的激光接口和手轮接口,ZMCSCAN没有。再者,ZMCSCAN的程序空间是ZMCSCAN的倍。总体来说,还是建议您选择ZMCSCAN。
正运动技术与合作伙伴邀您共聚武汉光博会
年5月日至日,正运动技术将在武汉光博会的中国光谷辩带伍科技会展中心A3馆3A展位,展示其在光电子领域的最新成果。此次展会不仅是探讨行业挑战与机遇的平台,也将 showcase 正运动技术的创新产品。
正运动技术将在展会上展出国内首款EtherCAT运动控制边缘控制器以及开放式激光振镜运动控制器,这将是一大亮点。参观者将能够亲自体验这些产品的独特功能和应用案例,并与专业团队就智能制造和激光加工等领域的创新思路进行深入交流。
产品介绍:
1. 开放式激光振镜运动控制一体机ZMCSCAN-V2
- 集成激光控制、振镜控制和总线轴/脉冲轴控制,实现高效的EtherCAT总线运动控制+激光振镜解决方案。
- 支持轴运动控制,实现点到点到多轴同步控制。
- 板载功能全面,包括4路差分脉冲轴接口、专用手轮接口、激光振镜接口、激光电源接口。
- 支持PSO功能,适用于视觉飞拍、精密点胶和激光能量控制。
- 通用输入输出丰富,支持高速色标锁存、高速PSO和PWM输出。
2. 全国产EtherCAT运动控制边缘控制器ZMCHG
- 高性能EtherCAT总线运动控制器,软硬件均为国产,适合多工位自动化产线应用。
- 支持轴运动控制,点到点到多轴同步控制。
- 板载多路接口,包括差分脉冲轴接口和编码器轴接口。
- 实现远程通信与实时控制,支持高速PWM输出、PSO硬件位置比较输出、视觉飞拍和高速硬件锁存。
- 通用输入输出丰富,支持高速色标锁存、高速PSO和PWM输出,并提供宽温版定制。
3. RTFuse快组态系统
- 为非标自动化设备提供中文示教式编程系统,简化了机器视觉与运动控制的二次开发流程。
- 无需编写代码,可快速实现开发。
- 集成EtherCAT总线、脉冲混合控制、机器视觉、运动控制等功能,易于调试与维护。
- 降低企业用人成本,一人可完成设备调试与控制。
正运动技术期待您的光临,共同探讨光电子产业的未来发展方向。在武汉光博会期间,让我们相聚3A展位,探索新机遇,共谋合作。